Qualsiasi veicolo imbardata (cioè svolta) applicando una coppia netta. La cosa interessante di un quadricottero non è solo come imbardata, ma come imbardata e non rotola, non becca o si arrampica allo stesso tempo .
Per capire come funziona, dobbiamo esaminare brevemente la matematica. Useremo una configurazione plus, ma in realtà qualsiasi configurazione mutirotore funziona.
La cosa da tenere in mente è che le spinte e le coppie sono correlate alle velocità dell'elica. Se acceleri un'elica, è intuitivamente ovvio che creerà più spinta. Allo stesso modo, se lo giri più velocemente, hai bisogno di più coppia. Quindi cambiare la velocità del motore cambia le forze nette e le coppie sulla cellula.
(Pedanticamente, va con il quadrato della velocità. Quindi se raddoppi la velocità, quadruplichi la spinta e la coppia. Ma non è importante per questa analisi.)
Ecco l'equazione di guida di alto livello. Se hai mai giocato con i mixer, noterai che la matrice 4x4 al centro sembra davvero familiare:

Cosa questo fa è mappare le velocità del rotore (al quadrato) alle coppie sugli assi di rollio, beccheggio e imbardata, nonché alla spinta verticale netta.
Per il volo stazionario, supponiamo che tutti i motori girino alla stessa velocità , W . Quindi W = w1 = w2 = w3 = w4
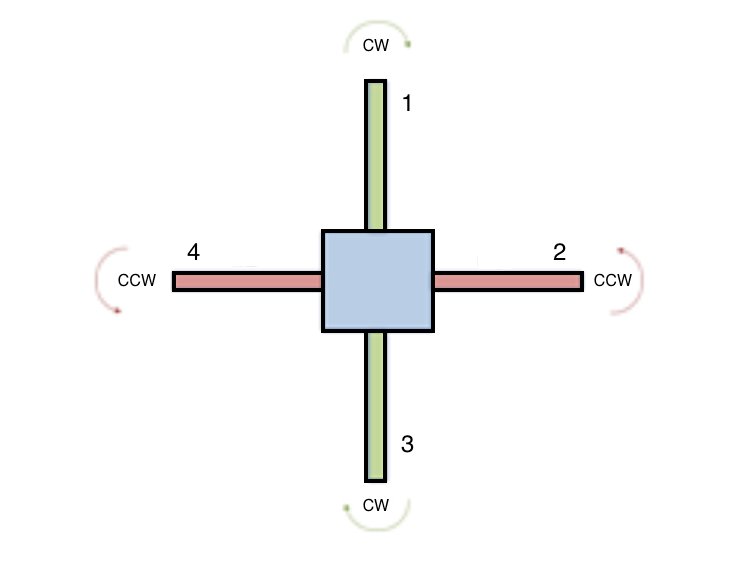
Yaw
Cosa succede se acceleriamo il primo e il terzo e rallentiamo il secondo e quarto della stessa quantità (al quadrato) dW ?
torque_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW ) = 0 coppia_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0torque_y = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 4 * dWF_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Quindi la forza netta non cambia (tutto il dW si cancella), e nemmeno la rete rotola e becca, ma voilà abbiamo 4 * dW di coppia!
Per completezza, ecco cosa succede quando vuoi cambiare anche gli altri assi.
Passo
Cambiamo i motori anteriore e posteriore della stessa velocità (al quadrato), ma lasceremo da soli gli altri due motori:
torque_x = 0 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 2 * dWtorque_y = 1 * (W ^ 2 + 0) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + 0) + 0 * ( W ^ 2 + dW) = 0 coppia_z = 1 * (W ^ 2 + 0) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Notare che, ancora una volta, la spinta z rimane costante, ma questa volta appare solo una coppia di beccheggio.
Roll
Cambiamo i motori sinistro e destro di la stessa velocità (al quadrato), ma lasceremo soli gli altri due motori:
torque_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0 coppia_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW ) + 0 * (W ^ 2 + 0) = 2 * dWtorque_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) = 4 * W ^ 2
Come sempre, la spinta z rimane costante, ma questa volta appare solo una coppia di rotolamento.
Spinta
Infine, cosa succede se acceleriamo tutti e quattro i motori di la stessa velocità (al quadrato)?
torque_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0 coppia_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0 coppia_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2 + 4 * dW
Quindi solo in questo caso vediamo un aumento della spinta verticale (di 4 * dW ). Notare come le coppie nette su ciascun asse si annullano.