David Megginson
2017-07-03 00:44:39 UTC
The airspace system is in the process of changing drastically, and I'm
following it this summer by finally biting the bullet and installing an IFR
GPS (Garmin GTN 650 <https://buy.garmin.com/en-CA/CA/p/67884>) and ADS-B
transponder (Garmin GTX 345 <https://buy.garmin.com/en-CA/CA/p/140949>) in
my Piper Warrior II.
What this means that for the first time in the 15 years since I started
flying in real life, I won't be able to use FlightGear to practice the IFR
approaches I'm flying in real life.
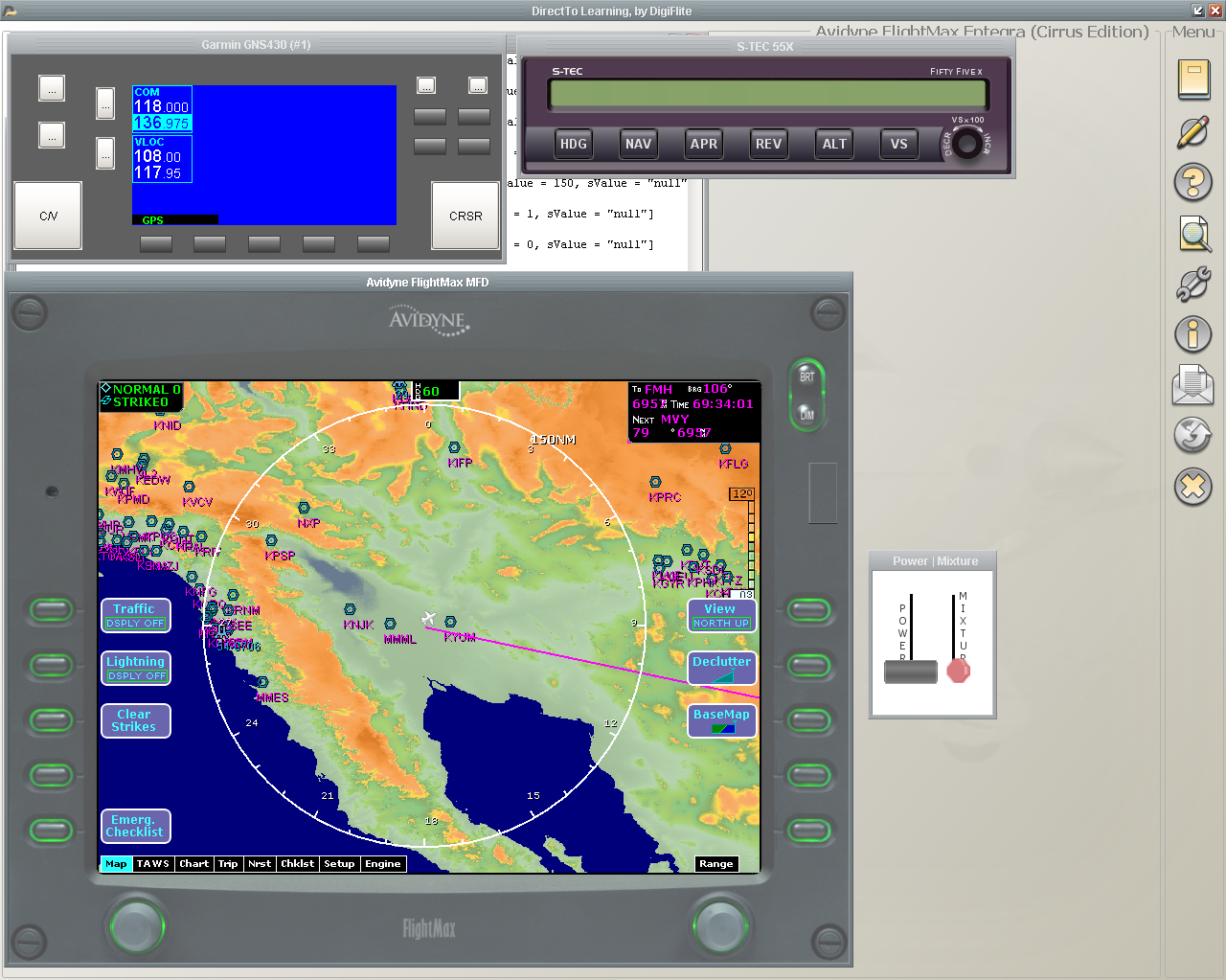
Note that this isn't just a matter of throwing up a canvas showing some GPS
waypoints and a magenta line. Modern navigators are astoundingly-complex
devices â probably an order of magnitude more lines of code than FlightGear
itself â and even their basic flight planning algorithms and databases
(e.g. fly-by waypoints vs fly-over waypoints, open vs closed approach
procedures, transitions into RNAV approaches, etc.) are far beyond the
scope of anything we've tried, and we'd also need an up-to-date database
far more complex than the ones we have now. Once you get to the extra
features, like FIS-B weather or TIS-B traffic info over ADS-B, or TAWS
(terrain alerting), we're probably in way over our heads trying to emulate
even the simplest general-aviation IFR GPS.
I don't have an easy solution â even with our amazing team of volunteer
developers, I doubt we have the capacity to pull this off â but then I
wonder whether that means that the usefulness of FlightGear will also
gradually taper off. Maybe we'll be able to connect to external simulators
for these units, and just accept not seeing them in the 3D cockpit.
Thoughts?
Cheers, David
p.s. If you have access to an iOS device or Windows PC, you can download
the GTN emulators from this links to see how complex even basic devices
are: https://itunes.apple.com/ca/app/garmin-gtn-trainer/id479670018?mt=8 |
http://www8.garmin.com/support/download_details.jsp?id=9256
following it this summer by finally biting the bullet and installing an IFR
GPS (Garmin GTN 650 <https://buy.garmin.com/en-CA/CA/p/67884>) and ADS-B
transponder (Garmin GTX 345 <https://buy.garmin.com/en-CA/CA/p/140949>) in
my Piper Warrior II.
What this means that for the first time in the 15 years since I started
flying in real life, I won't be able to use FlightGear to practice the IFR
approaches I'm flying in real life.
Note that this isn't just a matter of throwing up a canvas showing some GPS
waypoints and a magenta line. Modern navigators are astoundingly-complex
devices â probably an order of magnitude more lines of code than FlightGear
itself â and even their basic flight planning algorithms and databases
(e.g. fly-by waypoints vs fly-over waypoints, open vs closed approach
procedures, transitions into RNAV approaches, etc.) are far beyond the
scope of anything we've tried, and we'd also need an up-to-date database
far more complex than the ones we have now. Once you get to the extra
features, like FIS-B weather or TIS-B traffic info over ADS-B, or TAWS
(terrain alerting), we're probably in way over our heads trying to emulate
even the simplest general-aviation IFR GPS.
I don't have an easy solution â even with our amazing team of volunteer
developers, I doubt we have the capacity to pull this off â but then I
wonder whether that means that the usefulness of FlightGear will also
gradually taper off. Maybe we'll be able to connect to external simulators
for these units, and just accept not seeing them in the 3D cockpit.
Thoughts?
Cheers, David
p.s. If you have access to an iOS device or Windows PC, you can download
the GTN emulators from this links to see how complex even basic devices
are: https://itunes.apple.com/ca/app/garmin-gtn-trainer/id479670018?mt=8 |
http://www8.garmin.com/support/download_details.jsp?id=9256